Mișcarea robotului pe distanțe măsurate în cm în EV3-G
Până acum am învățat despre cum să facem robotul să înainteze, dar pe ce distanță? Am învățat ca prin încercări să determinăm num�…
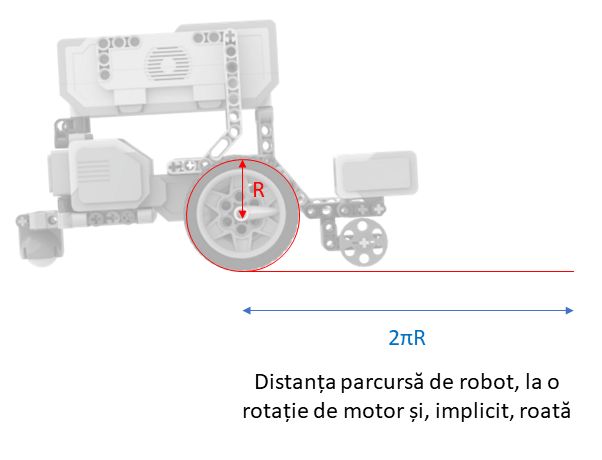
Până acum am învățat despre cum să facem robotul să înainteze, dar pe ce distanță? Am învățat ca prin încercări să determinăm num�…
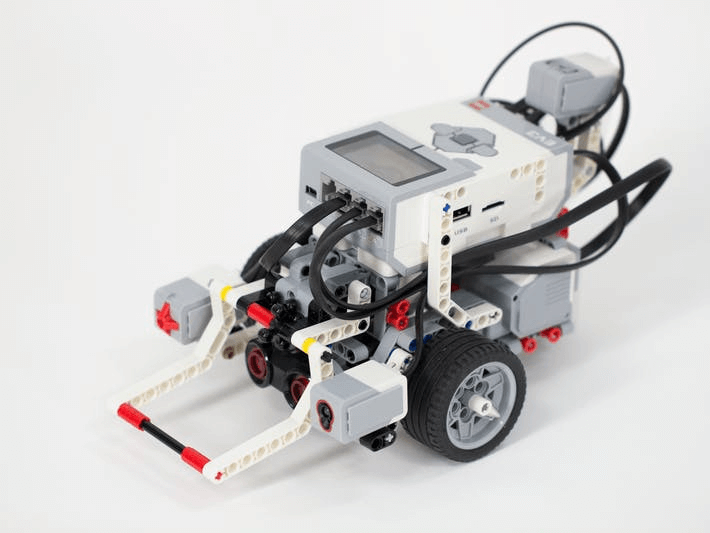
Un robot poate avea orice formă și poate fi construit să satisfacă cerințele misiunii pe care trebuie să o îndeplinească. Unele aspecte con…
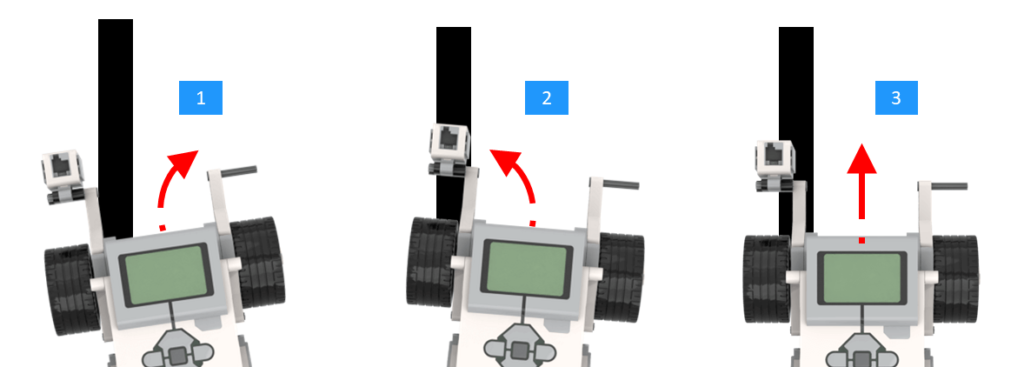
Noțiunea de line follower (urmărirea liniei) este un concept de bază în robotică. Este folosit mai ales în industrie, unde robotul trebuie s�…
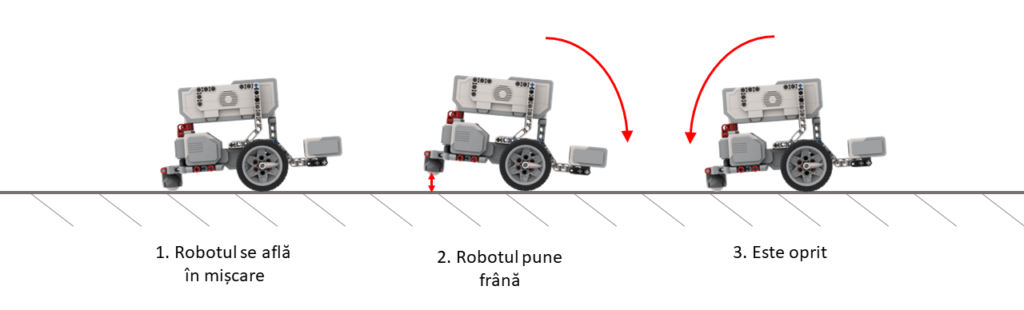
Pe măsură ce programați diverși roboți, veți vedea că programul nu rulează întotdeauna la fel. Sunt o mulțime de motive pentru care robot…
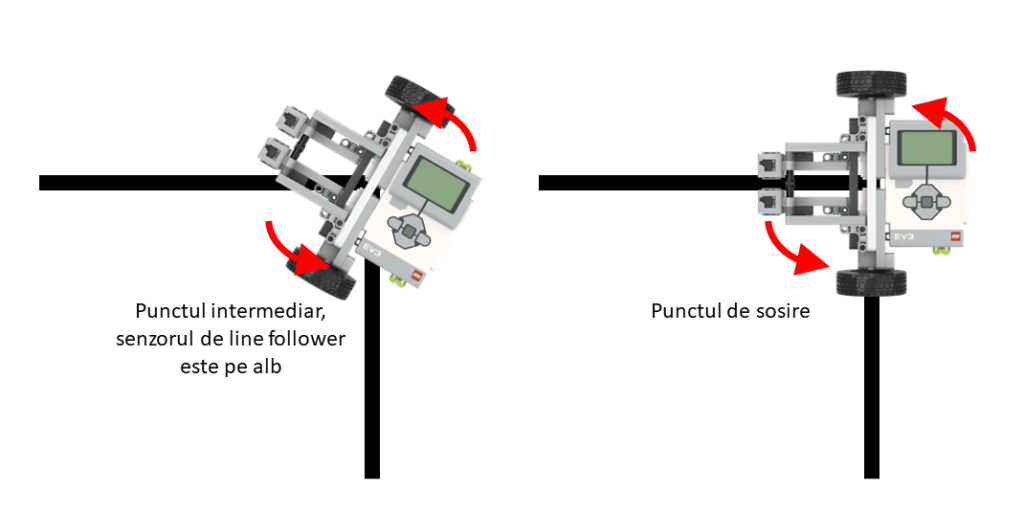
Algoritmul de line follower poate urmări linia cât timp nu are un viraj foarte strâns sau drept. Ar trebui să mergem foarte încet astfel înc�…