Iată o parte din subiectele pe care le vom aborda în acest curs:
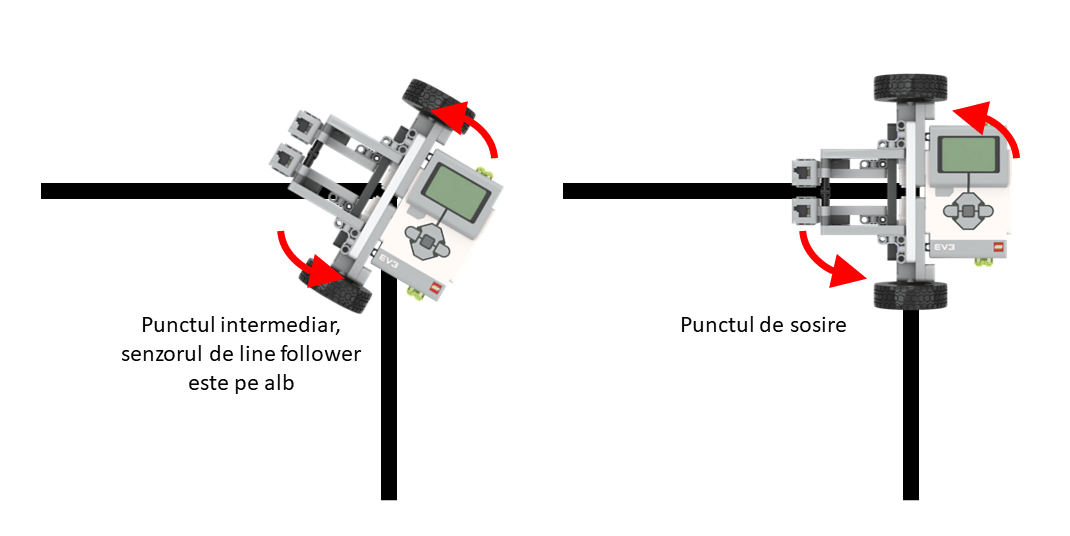
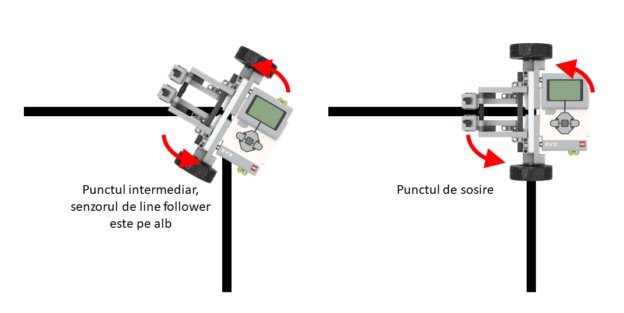
- când este necesară rotirea;
- cum se realizează rotirea la linie;
Gratuit

 +25 înscris
+25 înscris Neînscris
Course Includes
- 2 Lecții
- 6 Subiecte
- 1 Evaluare
Log in
Accesarea acestui curs necesită autentificare. Vă rugăm să introduceți datele de autentificare mai jos!